




{kind=link}
{kind=link}
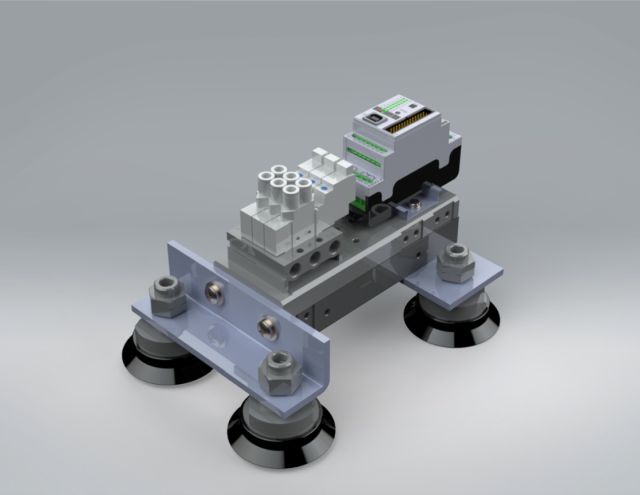
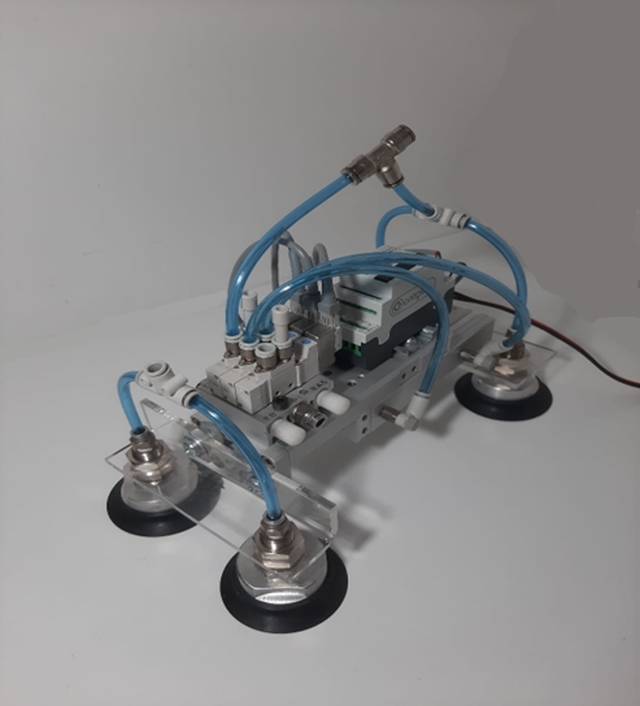
Pneumatic mobile robot for climbing vertical surfaces
Author: MARKO BAKOTIC
Menthor: ZELJKO SITUM
Company/Institution: University of Zagreb, Faculty of Mechanical Engineering and Naval Architecture
Country: CROATIA
e-mail: markobakotic@gmail.com; mb242385@stud.fsb.hr;
web: https://www.fsb.unizg.hr
The innovation represents a mobile robot with pneumatic drive that has the ability to move on vertical flat surfaces using vacuum grippers. It is intended for applications in industry, inspection, maintenance or cleaning of spaces where access for people is difficult or dangerous, for example on glass facades, high walls or inside tanks. Such robots must ensure a firm grip on the wall, carry work tools and equipment and flexible movement while performing specific tasks. The peculiarity of the system lies in the use of pneumatic drive, which makes it environmentally friendly and safe to operate. The robot has a modular design and the control system can be easily adapted depending on the specific application or working conditions. Control is carried out via the Controllino Mini microcontroller, allowing easy upgrading and adaptation to new functions. This platform provides a reliable, flexible and multi-use solution for automating demanding operations on vertical smooth surfaces.
