
{kind=link}
An application for controlling a robotic arm
Author: DOMINIK TICAK
Menthor: TOMISLAV MATIC
School: Elektroindustrijska i obrtnička škola Rijeka
Country: CROATIA
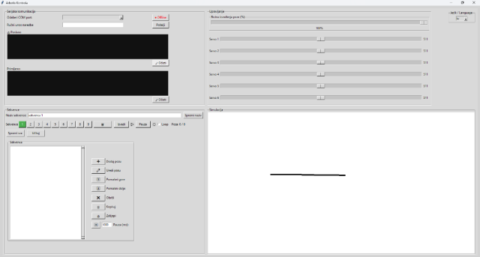
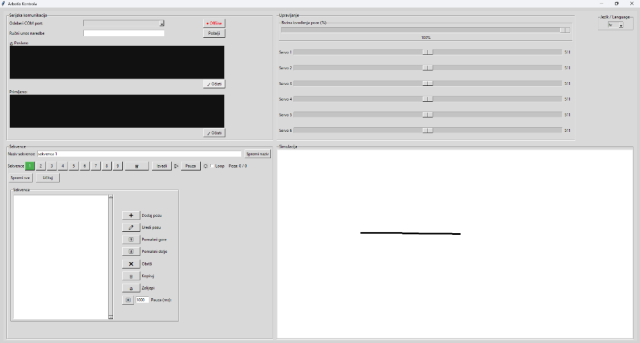
The program is divided into 4 parts, namely serial communication, control, sequences and simulation. The special feature of this program is that it is universal, which means that it can be used to control any robotic arm. We have a graphical user interface that allows you to control six servo motors and a slider for the speed of the robotic arm. The interface is designed to allow the user to easily control each servo motor separately using the slider. The program is designed to communicate with the Arduino board, which then controls the robotic arm.
