
{kind=link}
Aplikacija za upravljanje robotskom rukom
Autor: DOMINIK TIČAK
Mentor: TOMISLAV MATIĆ
Škola: Elektroindustrijska i obrtnička škola Rijeka
Država: HRVATSKA
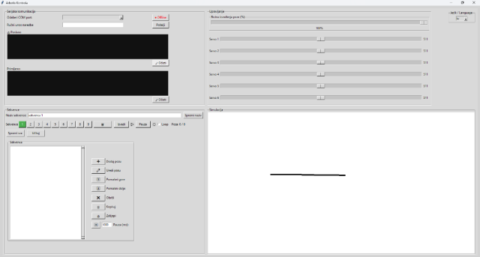
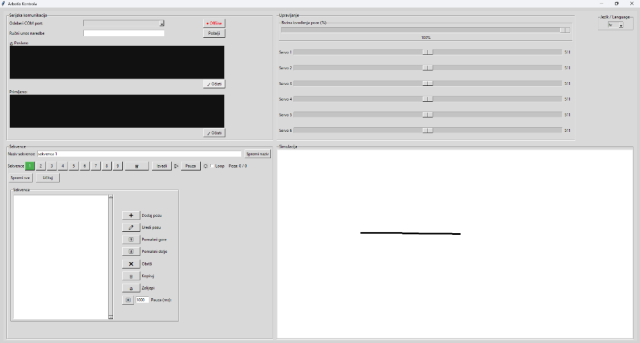
Program se dijeli na 4 dijela, a to su serijska komunikacija, upravljanje, sekvence i simulacija. Posebnost ovog programa jest to što je univerzalan što bi značilo da se može koristiti za upravljanje svakom robotskom rukom. imamo grafičko korisničko sučelje koje omogućuje upravljanje sa šest servo motora i klizačem brzine kretanja robotske ruke. Sučelje je izrađeno tako da korisniku omogućuje jednostavno upravljanje svakim servo motorom zasebno pomoću klizača. Program je napravljen tako da komunicira s arduino pločicom koja onda upravlja robotskom rukom.
