




{kind=link}
{kind=link}
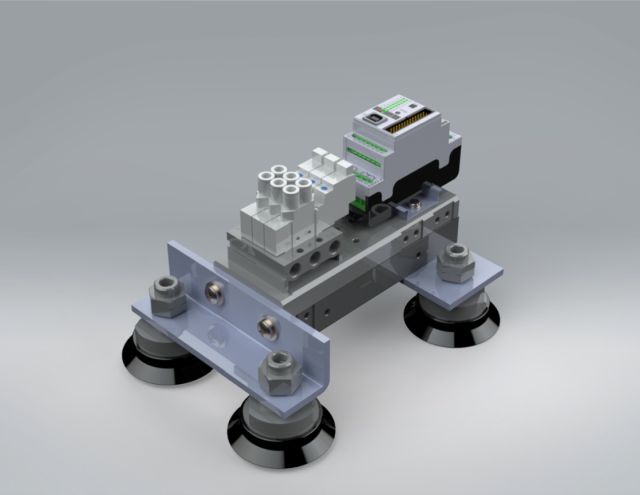
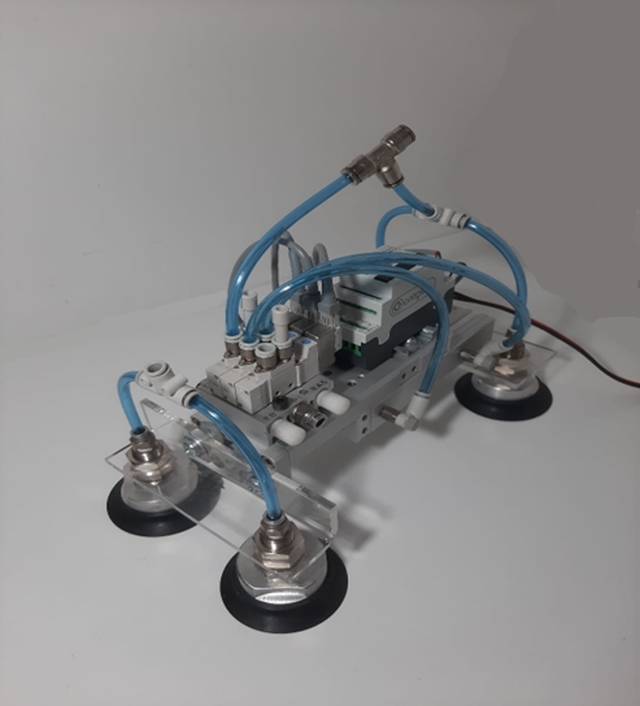
Pneumatski mobilni robot za penjanje po vertikalnim površinama
Autor: MARKO BAKOTIĆ
Mentor: ŽELJKO ŠITUM
Tvrtka/Institucija: Sveučilište u Zagrebu Fakultet strojarstva i brodogradnje
Država: HRVATSKA
e-mail: markobakotic@gmail.com; mb242385@stud.fsb.hr;
web: https://www.fsb.unizg.hr
Inovacija predstavlja mobilnog robota s pneumatskim pogonom koji ima mogućnost kretanja po vertikalnim ravnim površinama koristeći vakuumske hvataljke. Namijenjen je za primjene u industriji, inspekciji, održavanju ili čišćenju prostora gdje je pristup ljudima otežan ili opasan, primjerice na staklenim fasadama, visokim zidovima ili unutar spremnika. Takvi roboti moraju osigurati čvrsto prianjanje na zid, nošenje radnih alata i opreme te fleksibilno gibanje tijekom obavljanja specifičnih zadataka. Posebnost sustava leži u upotrebi pneumatskog pogona, što ga čini ekološki prihvatljivim i sigurnim za rad. Robot ima modularnu konstrukciju te se upravljački sustav može lako prilagoditi ovisno o konkretnoj primjeni ili radnim uvjetima. Upravljanje se odvija putem mikrokontrolera Controllino Mini, omogućujući jednostavnu nadogradnju i prilagodbu novim funkcijama. Ova platforma pruža pouzdano, fleksibilno i višestruko upotrebljivo rješenje za automatizaciju zahtjevnih operacija na vertikalnim glatkim površinama.
